Description
Summary
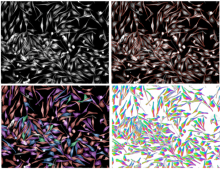
Deep learning-based segmentation of cells, both fluorescence, and bright-field images ("a generalist algorithm for cellular segmentation"). The tool can be used either online or local or via notebooks (e.g. ZeroCostDL4Mic).
How to use it
cellpose can be used online via ready-to-use Jyupyter notebooks with very good documentation. These notebooks are listed here.
Local Installation
The general local installation procedure can be found here.
... Installing to Silicon Mac (M1 processor) needs some tricks, and as of October 2021, the following sequence of commands works. numba should be conda-installed before pip-installing the cellpose.
conda create --name cellpose python=3.8
conda activate cellpose
conda install numba
git clone https://github.com/MouseLand/cellpose.git
cd cellpose
pip install -e .