Description
This plugin allows to compute a similarity (translation/rotation/scaling and flipping) transform from pair of points. It is updating the transformed image interactively such that the user get immediate feedback. The transformation is saved and can be applied to any other stack/image. Non rigid deformation can also be applied in 2D or 3D.
3D/3D,2D/3D or 3D /2D can be handled .
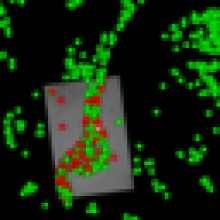
3D ROI are enabled, and can be checked with the 3D vtk view (size of ROI can be changed using the ROI stroke width).
Some prealignment by rotating in 3D the volume is possible.
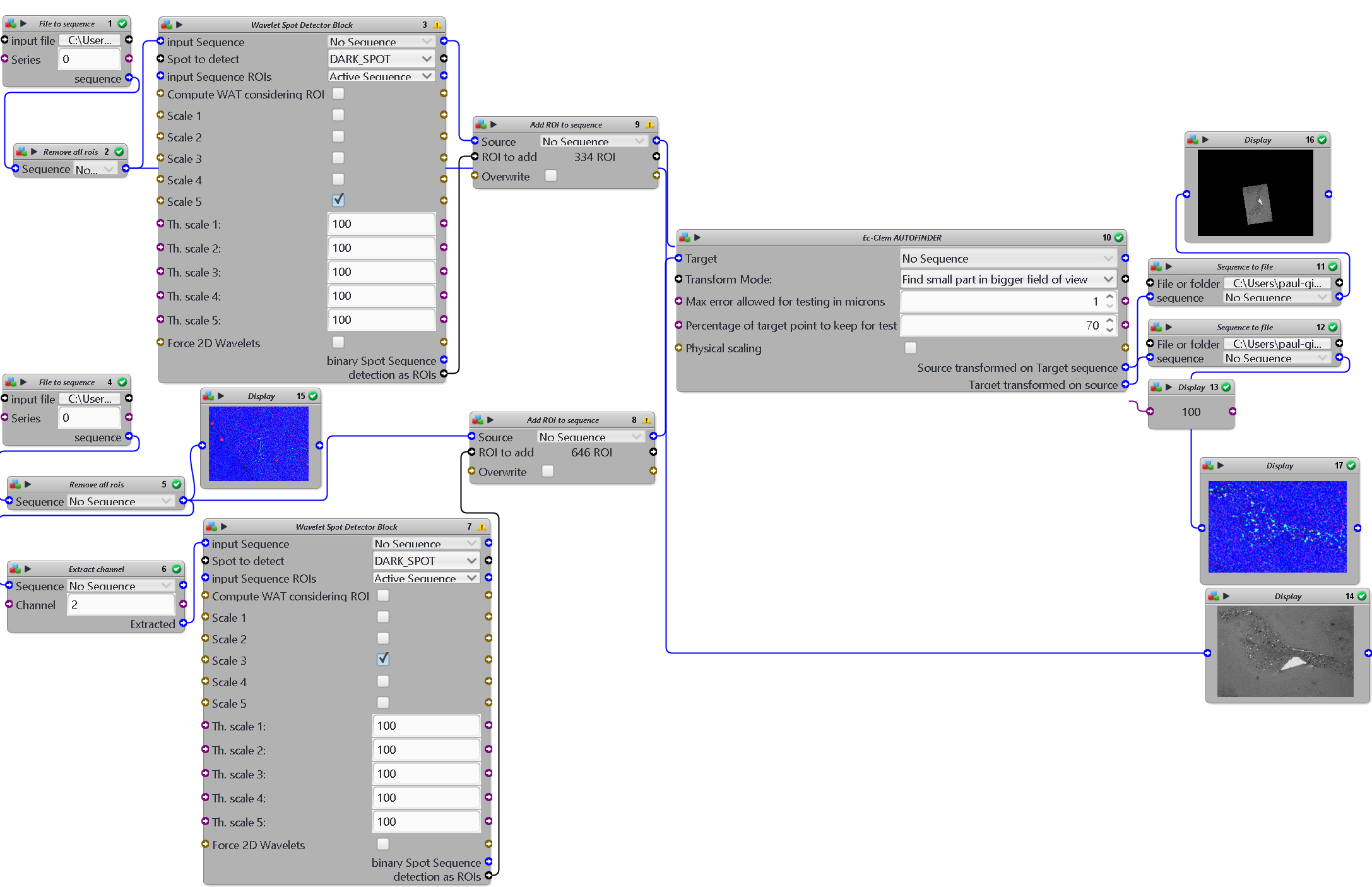
Transformations can be applied directly or combined through Block Protocols (search for apply transformation).
It's also provide information about the predicted Error (based on statistical prediction), either as a full color mapping, either on each points used as landmarks, and error on the discrepancy in position between points.
There are video tutorials available in the web.