Description
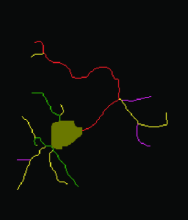
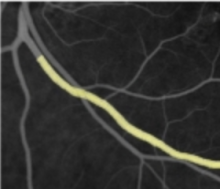
3DeeCellTracker is a deep-learning based pipeline for tracking cells in 3D time-lapse images of deforming/moving organs.
The installation comprises a set of Jupyter notebooks and a library they depend on. The workflow steps include separate training and segmentation/tracking.
Examples of cell tracking from the reference publication are: ~100 cells in a freely moving nematode brain, ~100 cells in a beating zebrafish heart, and ~1000 cells in a 3D tumor spheroid.