Description
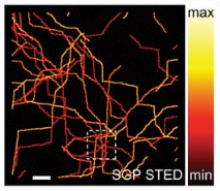
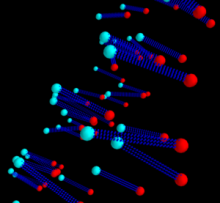
A deconvolution component applicable to confocal and STED microscopy. The MATLAB function fo this package implements the SGP method for n-dimensional object deblurring with the option of boundary effects removal. Although this is a preliminary version, results seem to be good from their paper (Zanella et al 2013).